
We did an upwind and downwind run with different currents and noted all the results. By the way, the prop is a 15 x 9 Flex-o-fold folding propeller.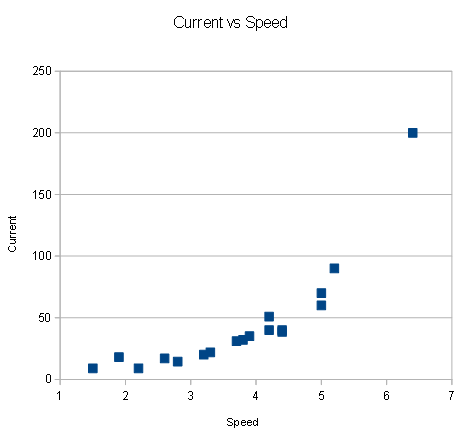
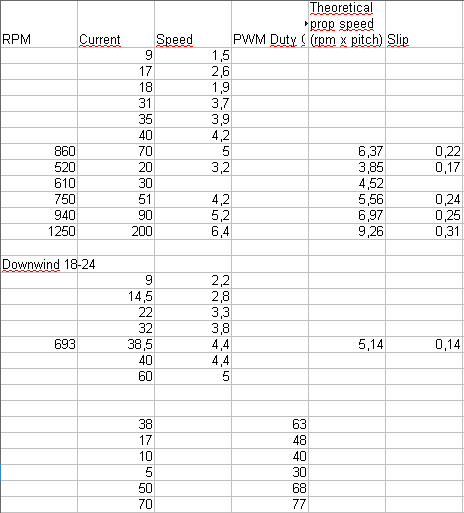
And here are all the results in OpenOffice format:
Trial-sail.ods
Month: December 2019
E-Day!!
Monday, December 23 2019. During the last days I have finished all the small jobs that were to be finished before the trial sail could be done. Connecting the controllers, the throttle lever, connecting the shaft flange to the motor shaft, filling the thrust bearing with oil, etc. etc.
But today it is E-Day! Around 10.30 the boat is picked up and carried to the crane to be lifted in.
And everything is working! It is a strange experience to hear nothing! Reversing out of the lifting berth are the first meters to sail, and it is difficult to get an idea how fast the prop is turning, so an RPM-meter in the cockpit would be nice.
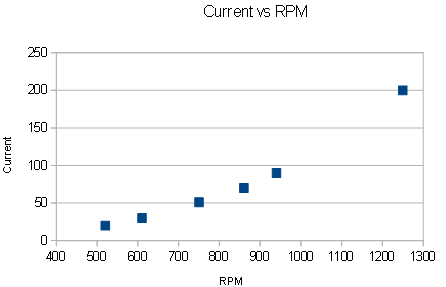
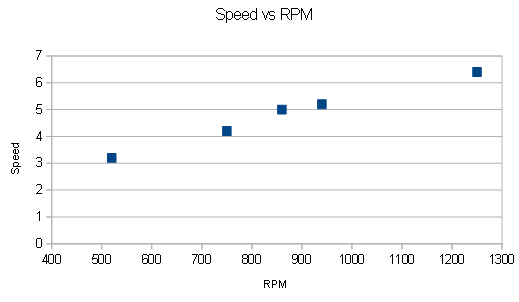
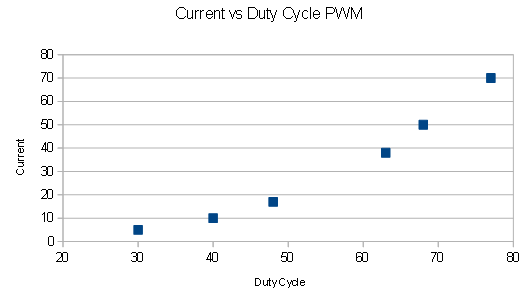
We do a test run up and down the canal, with head and tail wind, with different current settings and we record everything: speed, current, RPM, etc.
Everything is running fine, some minor details need to be adjusted: there is some vibration of the motor because of a misalignment of the flanges between prop shaft and motor, the throttle behaviour (can’t give full speed with the throttle lever) needs to be adjusted, but that is only minor. The main thing is that the boat is doing 4.3 knots at 2 kW, and 6.4 knots at full (10kW) speed. That 4.3 knots is a very good economical speed, that gives a range of approximately 30 miles.
And of course a bit of boys and toys: the remote is also working fine.
One more video from the running motor:
The actual work begins
November 2019, the sailing season is over, the real work starts! First of course, the old diesel engine needs to be removed. I carefully disconnected all the electricity (made pictures of what was connected with what), the diesel pipes and at last the mechanical connections. Than lifted it up a little bit on a plank and shifted it forward into the cabin. Next the guy from the yard helped to lift it out.
And of course the electric motor was lifted in. The electric motor was prepared with supports that fitted the old motor supports exactly, so in fact it was an easy drop in replacement.

With a 2×3 beam (44mm x 75mm balk) the thing can be lifted in and out of the engine bay quit easily without hurting my back.
After that, the batteries were carried on board and connected to one large battery, they are not yet installed in all the different places (under bunks, behind the water tank, above the motor etc.), I will do that after the trial is done, and everything (motor capacity, controller etc) is OK, and I am confident that the project will be successful.
Next step: the thrust bearing. Because I do not know if the electric motor has a thrust bearing in it (to transfer the forces of the shaft to the boat), and most likely it doesn’t have it, because the motor was used for a hydraulic unit, a thrust bearing needs to be installed.
I mounted it on a steel plate that has the right slope (12 degrees up) so it is perfectly aligned with the shaft and the bottom, and glassed it over with 8 layers of 280 gram fiberglass cloth.
For the coupling of the shaft with the motor, the old flange was reused, but now with 3 holes instead of four. On the motor a new flange was mounted (bought it for EUR 5, second hand), this motor flange had to be machined on a lath to fit it to the flange on the propshaft. Thanks Peter for doing that!
The PWM controller and Arduino controller were mounted in a temporary way, and tested. The throttle was installed, and yes, everything seemed to work! Time to plan the wet trial!